Introduction:
- There are 60,000 table saw accidents a year, So we have an idea of a saw that can sense, react, and stop before the blade can cut your hand.
- we developed a saw that promises to save your fingers in the event of your hand touches the blade while it's running. The technology behind that activates a blade brake within a fraction of a second.
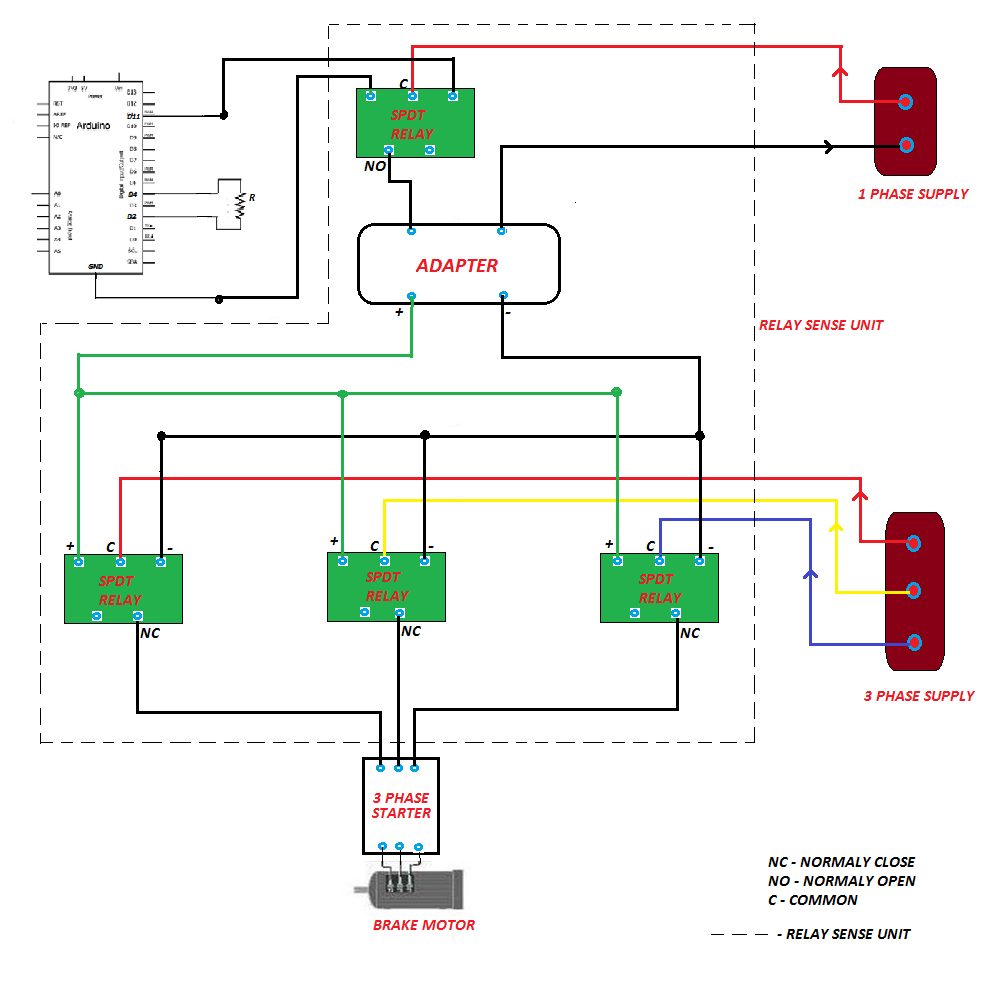
Block Diagram Of Table Saw Protection :
https://www.youtube.com/watch?v=2LIDBMK2cj8
How It Works? :
- We use Capacitive touch sense to protection against the Table Saw.
- Capacitive touch sensing is a way of human touch sensing, that requires little or no force to activate. It may be used to sense human touch through more than a quarter of an inch of plastic, wood, ceramic or other insulating material (not any kind of metal though), enabling the sensor to be completely visually concealed.
- Basically the arduino measures how much time the capacitor (i.e the touch sensor) takes to charge, giving it an estimate of the capacitance.The capacitance may be very small, nevertheless the Arduino measures it with accuracy.

Watch a short video demonstration : https://www.youtube.com/watch?v=u_dznopWYgU
Working of Table Saw Protection :
- The register is connected between arduino pin number 2 & 4 through Aluminium foil, By accidentally if your hand comes near to the blade ,the Aluminum Foil placed on the board senses the human finger and the changed Capacitance is measured by arduino uno and it will trip the relays, consequently motor starter energized so instant shut off the 3 phase Brake Motor.
PROGRAM OF CAPACITIVE TOUCH SENSE :
// Add the capacitive library and past below proram.
#include
<CapacitiveSensor.h>
int led = 11;
//change '4 2' to any desired
pin.
long time = 0;
int state = LOW;
boolean yes;
boolean previous = false;
int debounce = 200;
CapacitiveSensor cs_4_2 =
CapacitiveSensor(4,2); // 10M resistor between pins
4 & 2, pin 2 is sensor pin, add a wire and foil
// To add more sensors...
//CapacitiveSensor cs_4_6 =
CapacitiveSensor(4,6); // 10M resistor between pins
4 & 6, pin 6 is sensor pin, add a wire and foil
//CapacitiveSensor cs_4_8 =
CapacitiveSensor(4,8); // 10M resistor between pins
4 & 8, pin 8 is sensor pin, add a wire and foil
void setup()
{
cs_4_2.set_CS_AutocaL_Millis(0xFFFFFFFF); //Calibrate the sensor.
pinMode(led, OUTPUT);
}
void loop()
{
long total1 =
cs_4_2.capacitiveSensor(30);
if (total1 > 150){yes = true;}
else {yes = false;}
// to toggle the state
of state
if(yes == true
&& previous == false && millis() - time>debounce){
if(state
== LOW){
state = HIGH;
}
else
state = LOW;
time = millis();
}
digitalWrite(led, state);
previous = yes;
Serial.println(millis()-time);
delay(10);
}

Watch video of table saw protection using brake motor :
Mail id: rutvik1211@gmail.com
Nice idea...
ReplyDelete